




② (微波成像技术国家级重点实验室 北京 100190)
③ (中国科学院大学 北京 100049)
② (National Key Laboratory of Science and Technology on Microwave Imaging, Beijing 100190, China)
③ (University of Chinese Academy of Sciences, Beijing 100049, China)
合成孔径雷达(Synthetic Aperture Radar, SAR)是20世纪50年代末研制成功的一种微波传感器,它可以对观测场景实现2维高分辨率成像。干涉合成孔径雷达(Interferometric Synthetic Aperture Radar, InSAR)是在SAR的基础上,通过对跨航向的双通道数据进行干涉处理,具有大面积生成地面高程模型(Digital Elevation Model, DEM)的能力。然而InSAR系统无法确定同一距离方位单元内的不同散射点的高度分布,因而该技术只能用来进行高程测量,不具备高度维分辨能力[1]。阵列干涉SAR系统是双通道InSAR技术的延伸,通过在跨航向依次增加多个天线形成天线阵列,从而具有高度维分辨能力,同时结合方位向合成孔径技术以及距离向脉冲压缩技术,阵列干涉SAR系统具备对观测场景实现3维成像的能力,在地形测绘、城市监测、森林遥感及军事侦察中具有广泛应用[2–8]。
阵列干涉SAR系统在高度维的分辨能力要求各通道对应的天线相位中心位置精确已知。然而,对于实际的SAR系统,由于加工工艺、安装误差、测量误差等因素的影响,天线相位中心位置不可能精确已知,相位中心位置误差将影响阵列干涉SAR系统的高度维分辨能力[9,10]。针对相位中心位置定标问题,国内外提出了多种定标算法。朱海洋[11]针对阵列下视3维成像雷达,利用有源定标器在回波数据域进行相位中心位置定标算法。韩阔业[12]基于传统阵列测向雷达阵列流型校正的思路,提出了基于分时校正源的有源校正方法。以上两种方法都需要利用有源定标器且在回波信号域进行。Pardini等人[13]将载机平台位置误差等转换为一个常数相位误差,利用最小熵准则对该相位误差进行了估计与补偿。Tebaldini等人[14]提出一种基于远场假设的循环迭代求解天线和目标位置的方法。由于阵列干涉SAR系统第3维成像基于2维SAR单视复图像,并且相位中心位置误差在距离向实际上带来一个空变的相位误差而非常数相位误差,此外机载阵列干涉SAR系统通常工作在较低相对高度,在这种工作条件下远场假设可能会带来较大的误差,因此以上算法不适合阵列干涉SAR系统相位中心位置定标。
本文提出一种基于子空间正交的阵列干涉SAR系统相位中心位置定标方法,该方法利用2维SAR单视复图像中的定标点(三面角反射器)数据,通过特征值分解得到噪声子空间,利用子空间正交原理求解各通道对应的天线相位中心位置。该方法可以同时求解得到各通道对应的天线相位中心位置,并且不需要进行相位解缠绕操作。仿真实验分析和实际数据处理验证了该方法的有效性。
2 信号模型 2.1 阵列干涉SAR信号模型阵列干涉SAR系统在跨航向具有多个通道,各个通道工作在相同频率下。假设阵列干涉SAR系统工作在正侧视模式,其数据获取示意图如图1所示。其中

|
图 1 阵列干涉SAR系统数据获取示意 Fig.1 Acquisition geometry of array 3D imaging SAR system |

|
图 2 正侧视零多普勒平面几何关系示意 Fig.2 Geometry in the zero Doppler plane |
不失一般性地,我们假设第1个通道对应的天线相位中心位置位于坐标原点,即

|
其中,
|
式中,“

|
出于表达简洁的角度,本文后续的推导中经常使用
将
|
将式(2)代入式(4)中,整理得到第n个通道的观测值可表示为:
|
式(5)即为理想情况下的阵列干涉SAR系统信号模型。从理想信号模型中可见,2维SAR单视复图像中像素单元的观测值和高程向目标后向散射系数是1对傅里叶变换对,因此目标第3维成像(高度维)可以通过对2维SAR数据进行傅里叶变换直接获得。当然,为了突破傅里叶变换方法的瑞利分辨率限制,也可以通过采用高分辨率谱估计方法[16–18](如MUSIC, CAPON)或压缩感知方法[19–21],获得高度向超分辨成像性能。
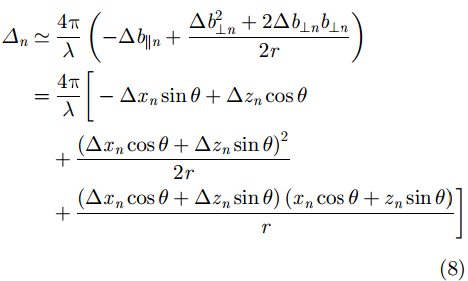
2.2 误差影响分析2.1节的信号模型是基于相位中心位置精确已知的前提,然而在实际的阵列干涉SAR系统数据获取过程中,由于加工工艺、安装误差、测量误差等因素的影响,各个天线相位中心位置不可避免地出现误差。该相位中心位置误差将导致式(4)中参考点的相位项出现误差。若记第n个通道对应的天线相位中心位置偏差为

|
因此,在存在相位中心位置误差时,式(5)中第n个通道的观测值需要改写为:
|
其中,
|
正是由于该距离向空变的相位误差的存在,导致高度维成像出现目标位置偏差或者聚焦效果变差甚至散焦现象。因此,阵列干涉SAR系统在进行高度维成像之前,必须进行定标处理得到准确的相位中心位置。之后可以利用该相位中心位置定标值进行高度维成像,或者根据相位中心位置定标值与标称值的偏差计算式(8)中的空变相位误差,对2维SAR数据进行补偿,再利用相位中心位置标称值进行高度维成像。
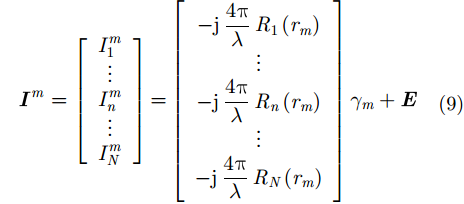
3 定标方法 3.1 算法描述在地面定标场人工布设M个位置信息已知的角反射器作为定标点,定标点布设时注意不要与其他目标形成叠掩,即保证在2维SAR单视复图像中定标点所在距离-方位单元内仅存在角反射器1个目标。对阵列干涉SAR系统获取的定标场SAR原始回波数据进行距离-方位2维成像,并与参考通道进行图像配准后,第m个
|
式中,

|
其中,
|
对观测值向量对应的协方差矩阵进行特征值分解得到
根据子空间正交原理[22],有如下等式:

|
其中,
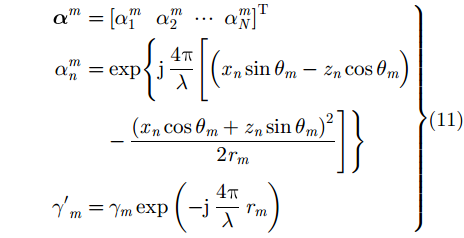
将N个通道对应的天线相位中心位置的跨航向(x)-高度向(z)坐标标称值以向量的方式分别记为

|
其中
|
所以有
|
将M个定标点数据进行组合,定义以下分块矩阵:
|
它们存在以下关系:

|
由于观测存在噪声,式(17)通常不等于0。定义代价函数

|
从而相位中心位置的定标可以通过求解最小化代价函数Q得到:

|
式(19)可以通过最小二乘法求解,方程组的个数为

|
从而得到相位中心位置定标值:

|
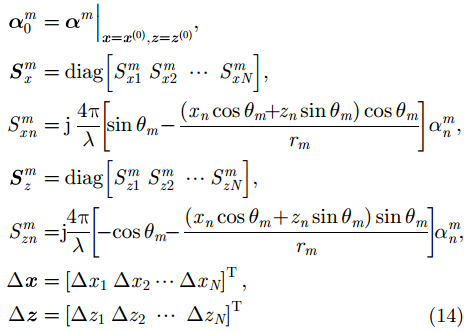
在实际操作中,为了提高相位中心位置定标的精度,将利用式(21)得到的定标值代入式(19)中计算得到代价函数Q,再将该定标值作为新的相位中心位置初始值进行迭代求解,直到代价函数值Q收敛或者达到一定的求解次数,停止迭代,得到相位中心位置的最终定标结果。需要注意的是,由于在相位中心位置标称值处采用了1阶泰勒展开,因此相位中心位置标称值误差不能太大,否则将导致算法不收敛或者收敛到错误的局部最小值。
3.2 算法流程基于子空间正交的阵列干涉SAR系统相位中心位置定标方法流程如图3所示。具体步骤如下:

|
图 3 相位中心位置定标流程图 Fig.3 Flow chart of APC calibration |
步骤1 根据定标点的位置信息以及系统的POS (Position and Orientation System)数据,计算定标点在已配准的2维单视复图像中的位置,提取定标点观测数据
步骤2 对观测数据的协方差矩阵进行特征值分解,求解得到噪声子空间
步骤3 根据式(13)、式(14)和式(16),得到分块矩阵
步骤4 根据式(20)和式(21)计算得到相位中心位置定标值,并计算该相位中心位置值对应的代价函数值。初始代价函数值由相位中心位置标称值计算得到,即
步骤5 判断代价函数值是否收敛或者达到最大迭代次数,如果是,返回此时的相位中心位置定标值,算法结束。否则,将步骤(4)中最新得到的相位中心位置估计值作为新的迭代初始值,重复步骤(3)和步骤(4)。
得到相位中心位置定标值之后,我们可以利用该相位中心位置定标值计算得到式(4)中
为了验证本文所提相位中心位置定标算法的有效性,分别进行了仿真数据验证和实际数据验证。4.1节仿真数据验证实验通过均方根误差定量地衡量了定标方法的精度,并且仿真得到了RMSE与信噪比、定标点误差以及迭代次数的关系。4.2节对1个实际的阵列干涉SAR系统进行了相位中心位置定标实验,定性地说明了本文定标算法的有效性。
4.1 仿真数据验证 4.1.1 仿真参数设置仿真实验中的系统参数如表1所示。
| 表 1 仿真实验中的系统参数 Tab.1 System parameters of simulation data |
各通道对应的天线相位中心位置标称值设置为:

|
相位中心位置实际值与标称值的偏差设置为:
|
相位中心位置真实值等于标称值与偏差之和:

|
仿真实验中设置4个定标点,下视角分别为
利用本文提出的相位中心位置定标算法进行定标,各个通道对应的天线相位中心位置的跨航向坐标x和高度向坐标z定标结果如图4所示。

|
图 4 仿真数据的相位中心位置定标结果 Fig.4 Calibration results of APC position in simulation |
为了定量地衡量定标算法的有效性,我们计算相位中心位置定标前后的均方根误差:

|
其中,
本节接下来的部分讨论在不同的信噪比、定标点误差及迭代次数条件下,本文定标算法的RMSE或代价函数值的变化情况。500次蒙特卡罗仿真结果如下:
(1) RMSE与信噪比的关系
由于噪声的存在将会影响噪声子空间提取的准确性,从而影响信号子空间与噪声子空间的正交性。因此通过500次蒙特卡罗仿真实验得到了本文基于子空间正交原理的定标算法RMSE与信噪比的关系。仿真结果见图5,其中绿色圆圈线是未定标时的RMSE(即标称值与真实值之间的RMSE),蓝色“+”线是利用本文定标算法得到的相位中心位置定标RMSE随信噪比SNR的变化关系曲线。由图5可见,本文定标算法RMSE随着SNR增加而快速减小。当SNR较小时,信号子空间与噪声子空间之间的正交性受到破坏,算法收敛到错误的局部最优解,导致定标精度甚至不如定标前。随着SNR的增大,定标算法的性能逐渐提升。具体地,当SNR>20 dB时,RMSE<1.0 mm;当SNR>34 dB时RMSE<0.2 mm。

|
图 5 RMSE与信噪比的关系 Fig.5 RMSE as a function of SNR |
(2) RMSE与定标点误差的关系
此处定标点的误差仅考虑定标点的位置测量误差。本文提出的定标算法中假设定标点的位置精确已知,当其存在测量误差时,主要影响式(14)中定标点下视角

|
图 6 RMSE与定标点误差的关系 Fig.6 RMSE as a function of CR errors |
(3) 代价函数与迭代次数的关系
考察不同迭代次数下的代价函数值,结果见图7。可见,当迭代初始值与真实值之间差异较小时,本文定标方法收敛速度非常快,迭代次数超过3次后代价函数值变化非常小,定标算法效率非常高。

|
图 7 代价函数与迭代次数的关系 Fig.7 Cost function as a function of the number of iterations |
实际数据来源于中国科学院电子学研究所自主研制的阵列干涉SAR系统[23],该系统载机平台及阵列天线构型如图8(a)所示,由于在跨航向具有多个通道,因此具备单航过实现对观测场景进行3维成像的能力。本次验证使用的数据是该系统于2015年4月获取的山西某县机载单航过数据,其系统参数与表1一致。该次实验中选择了1块裸露的平地作为定标场,布设有9个三面角反射器作为定标点,定标场的单视复图像及所用的三面角反射器如图8(b)所示。利用文献[24,25]中的信杂比计算公式,该次实验数据中各定标点的信杂比在33~36 dB之间。定标点位置采用GPS差分测量,测量精度能够达到5 cm量级。根据4.1节的仿真结果,预计实际数据的相位中心位置定标精度能达到0.16~0.21 mm。

|
图 8 实验系统及定标场图像 Fig.8 The experiment system and calibration site |
利用该定标场数据,针对阵列干涉SAR系统进行了相位中心位置定标实验。首先,我们将相位中心位置的预先物理测量值作为标称值。然后利用InSAR定标方法进行逐基线定标,组合得到所有通道对应的天线相位中心位置记为InSAR定标值,作为真实值的1个参考。最后按照3.2节中介绍的算法流程,利用本文提出的定标方法对阵列干涉SAR系统进行相位中心位置定标。注意到,由于本文算法可以同时标定所有天线相位中心位置,并且不需要进行相位解缠绕操作,因此本文所提算法在实现难度和实现效率上较逐基线InSAR定标方法有优势。定标结果如图9所示。图中用不同颜色和标记分别绘出了相位中心位置标称值、InSAR定标值以及本文算法定标值,图9(a)和图9(b)分别为相位中心位置的跨航向和高度向坐标。从图中可以看出,本文所提算法的定标结果与标称值存在一定差异,但与InSAR定标结果相似。由于无法准确获知该系统的真实相位中心位置值,我们无法直接衡量定标算法的有效性,下面通过1组实际数据的高度维成像实验来间接说明。

|
图 9 实际数据相位中心位置定标结果 Fig.9 Calibration results of APC position in an airborne experiment |
高度维成像实验选用的观测场景如图10(d)所示。场景中近距端存在严重的建筑物叠掩,远距端有大片相对平坦的区域。利用CAPON方法对方位向第2000像素处的1条距离线(图10(d)中的红线)进行高度维成像。采用相位中心位置标称值、InSAR定标值和本文算法定标值的成像结果分别如图10(a)–图10(c)所示。图10(b)中的InSAR定标值的高度维成像结果用于提供1个较为真实可信的结果,其中距离向第200~600像素的3条亮斜线准确地反映了2维SAR图像中互相叠掩的3栋建筑物,第670~730像素对应着2维SAR图像中的1栋小矮楼,第800~1500像素对应着2维SAR图像中的平地区域。

|
图 10 实际数据验证实验 Fig.10 Real data experiments |
与图10(b)相比,图10(a)中观测场景高程向的位置出现了明显偏差,而且该位置偏差随距离空变,这正是由于相位中心位置标称值存在误差导致的距离向空变相位造成的,这与2.2节中相位中心位置误差的影响分析相符合。图10(c)是利用本文算法定标值的高度维成像结果,与图10(b)中InSAR定标值的高度维成像结果十分吻合。
对图10(a)–图10(c)中距离向第350和900像素点进行高程向切片分析,切片位置见图中两条红线。切片结果对比分别示于图10(e)和图10(f)中。图10(e)中4个峰值点分别对应了第1栋建筑物的楼底、第2栋建筑物的楼体侧面以及第3栋建筑物的楼体侧面及楼顶。标称值和本文算法定标值的高程向切片结果对比显示,本文算法定标值成像结果的主瓣宽度比标称值的窄,并且高程向位置更加准确。图10(f)是距离向第900像素点的高程向切片结果对比,显示了与图10(e)类似的结果。
5 结论本文在建立阵列干涉SAR系统理想信号模型的基础上,给出了在存在相位中心位置误差时的信号模型。值得注意的是,本文信号模型中使用Fresnel近似而非远场假设,使得信号模型更加准确,适用性也更广,因为在很多低空的机载实验以及小型无人机载实验中远场假设并不那么准确。此外,基于2维SAR图像域数据,提出了一种基于子空间正交的阵列干涉SAR系统相位中心位置定标算法和定标处理流程。仿真数据实验定量地衡量了本文所提相位中心位置定标方法的有效性,并且分析了RMSE与信噪比、定标点位置误差及迭代次数的关系。使用中科院电子所自主研制的阵列干涉SAR系统的实际数据,验证了定标方法的有效性。
| [1] |
张红, 江凯, 王超, 等. SAR层析技术的研究与应用[J].
遥感技术与应用, 2010, 25(2): 282-287. Zhang Hong, Jiang Kai, Wang Chao, et al. The current status of SAR tomography[J]. Remote Sensing Technology and Application, 2010, 25(2): 282-287. (  0) 0)
|
| [2] |
Zhang F B, Liang X D, Wu Y R, et al. 3D surface reconstruction of layover areas in continuous terrain for multi-baseline SAR interferometry using a curve model[J].
International Journal of Remote Sensing, 2015, 36(8): 2093-2112. DOI:10.1080/01431161.2015.1030042 (0)
|
| [3] |
张福博, 梁兴东, 吴一戎. 一种基于地形驻点分割的多通道SAR三维重建方法[J].
电子与信息学报, 2015, 37(10): 2287-2293. Zhang Fu-bo, Liang Xing-dong, and Wu Yi-rong. 3-D reconstruction for multi-channel SAR interferometry using terrain stagnation point based division[J]. Journal of Electronics & Information Technology, 2015, 37(10): 2287-2293. DOI:10.11999/JEIT150244 ( 0)
|
| [4] |
Zhu X X and Bamler R. Superresolving SAR tomography for multidimensional imaging of urban areas: Compressive sensing-based TomoSAR inversion[J].
IEEE Signal Processing Magazine, 2014, 31(4): 51-58. DOI:10.1109/MSP.2014.2312098 (0)
|
| [5] |
Schmitt M, Shahzad M, and Zhu X X. Reconstruction of individual trees from multi-aspect TomoSAR data[J].
Remote Sensing of Environment, 2015, 165: 175-185. DOI:10.1016/j.rse.2015.05.012 (0)
|
| [6] |
Tebaldini S and Ferro-Famil L. High resolution three-dimensional imaging of a snowpack from ground-based SAR data acquired at X and Ku band[C]. Proceedings of 2013 IEEE International Geoscience and Remote Sensing Symposium, Melbourne, VIC, Australia, 2015: 77–80.
(0)
|
| [7] |
Reigber A and Moreira A. First demonstration of airborne SAR tomography using multibaseline L-band data[J].
IEEE Transactions on Geoscience and Remote Sensing, 2000, 38(5): 2142-2152. DOI:10.1109/36.868873 (0)
|
| [8] |
丁振宇, 谭维贤, 王彦平, 等. 基于波数域子孔径的机载三维SAR偏航角运动误差补偿[J].
雷达学报, 2015, 4(4): 467-473. Ding Zhen-yu, Tan Wei-xian, Wang Yan-ping, et al. Yaw angle error compensation for airborne 3-D SAR based on wavenumber-domain subblock[J]. Journal of Radars, 2015, 4(4): 467-473. DOI:10.12000/JR15016 ( 0)
|
| [9] |
Tebaldini S and Guarnieri A M. On the role of phase stability in SAR multibaseline applications[J].
IEEE Transactions on Geoscience and Remote Sensing, 2010, 48(7): 2953-2966. DOI:10.1109/TGRS.2010.2043738 (0)
|
| [10] |
朱海洋, 洪峻, 明峰. 相位中心偏差对机载阵列天线下视3D-SAR成像影响分析[J].
电子与信息学报, 2012, 34(4): 910-916. Zhu Hai-yang, Hong Jun, and Ming Feng. Analysis of impact of phase center variations in linear array antena downward-looking 3D-SAR imaging[J]. Journal of Electronics & Information Technology, 2012, 34(4): 910-916. DOI:10.3724/SP.J.1146.2011.00776 ( 0)
|
| [11] |
朱海洋. 阵列下视3D-SAR相位中心定标方法研究[D]. [硕士论文], 中国科学院大学, 2012.
Zhu Hai-yang. Study on phase center calibration methods of linear array downward-looking 3D-SAR[D]. [Master dissertation], University of Chinese Acedamy of Science, 2012. ( 0)
|
| [12] |
韩阔业. 基于稀疏线阵的机载合成孔径雷达成像模型、方法与实验研究[D]. [博士论文], 中国科学院大学, 2015.
Han Kuo-ye. Study on model, algorithm and experiment for airborne synthetic aperture radar imaging based on sparse linear array antennas[D]. [Ph.D. dissertation], University of Chinese Academy of Sciences, 2015. ( 0)
|
| [13] |
Pardini M, Papathanassiou K, Bianco V, et al.. Phase calibration of multibaseline SAR data based on a minimum entropy criterion[C]. Proceedings of 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 2012: 5198–5201. DOI: 10.1109/IGARSS.2012.6352438.
(0)
|
| [14] |
Tebaldini S, Rocca F, d’Alessandro M M, et al. Phase calibration of airborne tomographic SAR data via phase center double localization[J].
IEEE Transactions on Geoscience and Remote Sensing, 2016, 54(3): 1775-1792. DOI:10.1109/TGRS.2015.2488358 (0)
|
| [15] |
Fornaro G, Lombardini F, and Serafino F. Three-dimensional multipass SAR focusing: Experiments with long-term spaceborne data[J].
IEEE Transactions on Geoscience and Remote Sensing, 2005, 43(4): 702-714. DOI:10.1109/TGRS.2005.843567 (0)
|
| [16] |
Urasawa F, Yamada H, Yamaguchi Y, et al.. Fundamental study on multi-baseline SAR tomography by Pi-SAR-L2[C]. Proceedings of the URSI Asia-Pacific Radio Science Conference, Seoul, South Korea, 2016: 514–515. DOI: 10.1109/URSIAP-RASC.2016.7601342.
(0)
|
| [17] |
柳祥乐. 多基线层析成像合成孔径雷达研究[D]. [博士论文], 中国科学院电子学研究所, 2007.
Liu Xiang-le. Study on multibaseline tomography synthetic aperture radar[D]. [Ph.D. dissertation], Institute of Electronics, Chinese Academy of Sciences, 2007. ( 0)
|
| [18] |
赵逸超, 朱宇涛, 粟毅, 等. 用于线阵三维SAR成像的二维快速ESPRIT算法[J].
雷达学报, 2015, 4(5): 591-599. Zhao Yi-chao, Zhu Yu-tao, Su Yi, et al. Two-dimensional fast ESPRIT algorithm for linear array SAR imaging[J]. Journal of Radars, 2015, 4(5): 591-599. DOI:10.12000/JR15065 ( 0)
|
| [19] |
Zhu X X and Bamler R. Superresolving SAR tomography for multidimensional imaging of urban areas: Compressive sensing-based TomoSAR inversion[J].
IEEE Signal Processing Magazine, 2014, 31(4): 51-58. DOI:10.1109/MSP.2014.2312098 (0)
|
| [20] |
Schmitt M and Stilla U. Compressive sensing based layover separation in airborne single-pass multi-baseline InSAR data[J].
IEEE Geoscience and Remote Sensing Letters, 2013, 10(2): 313-317. DOI:10.1109/LGRS.2012.2204230 (0)
|
| [21] |
李杭, 梁兴东, 张福博, 等. 基于高斯混合聚类的阵列干涉SAR三维成像[J].
雷达学报, 2017, 6(6): 630-639. Li Hang, Liang Xing-dong, Zhang Fu-bo, et al. 3D imaging for array InSAR based on Gaussian mixture model clustering[J]. Journal of Radars, 2017, 6(6): 630-639. DOI:10.12000/JR17020 ( 0)
|
| [22] |
Stoica P and Nehorai A. MUSIC, maximum likelihood, and Cramer-Rao bound[J].
IEEE Transactions on Acoustics, Speech, and Signal Processing, 1989, 37(5): 720-741. DOI:10.1109/29.17564 (0)
|
| [23] |
张福博. 阵列干涉SAR三维重建信号处理技术研究[D]. [博士论文], 中国科学院大学, 2015.
Zhang Fu-bo. Research on signal processing of 3-D reconstruction in linear array Synthetic Aperture Radar interferometry[D]. [Ph.D. dissertation], University of Chinese Acedamy of Science, 2015. ( 0)
|
| [24] |
Freeman A. SAR calibration: An overview[J].
IEEE Transactions on Geoscience and Remote Sensing, 1992, 30(6): 1107-1121. DOI:10.1109/36.193786 (0)
|
| [25] |
焦培南, 张忠治. 雷达环境与电波传播特性[M]. 北京: 电子工业出版社, 2007.
Jiao Pei-nan and Zhang Zhong-zhi. Radio Environment and Radio Wave Propagation Characteristics[M]. Beijing: Publishing House of Electronics Industry, 2007. ( 0)
|